TB6600 Stepper Motor Controller: Pinout, Arduino Interface, and How It Works
Catalog

Overview of TB6600 Stepper Motor Driver Module
The TB6600 stepper motor driver module is a device distinguished by its resilience and adaptability for controlling 2-phase stepper motors. It connects seamlessly to a wide array of microcontrollers, mostly Arduino, fostering the creation of accurate 5V digital pulse outputs. These outputs are dynamic for maintaining the delicate balance of motor control. Operating within a voltage range of 9-42V DC and supporting a peak current of 4 Amps, it is a versatile choice for various motor-driven projects. This adaptability allows you to efficiently manage motor positioning and speed, which is highly beneficial in applications that aim to minimize coding complexity. The module's high-frequency optocoupler isolation significantly enhances its reliability by reducing interference risks and ensuring steady operation.
The harmony with numerous microcontrollers makes the TB6600 driver a fitting choice for projects requiring intricate motor control. It integrates smoothly with platforms like Arduino, reflecting its capacity to meet diverse expectations. For instance, using this driver in CNC machines or 3D printers enables precise and controlled movement, which illustrates its utility in various fields.
This module stands out thanks to its support for both 2-phase and 4-phase stepper motors as well as hybrid configurations. The bipolar H-bridge design is integral to efficiently managing voltage and current, ensuring the driver delivers peak performance across its applications. In environments where precision and reliability are prioritized, such as automated production lines and robotics, these features are highly valued.
Features
|
Feature |
Description |
|
Driver Type |
Bipolar H-bridge DC driver |
|
Output Current Options |
8 types (0.5A to 3.5A), selectable up to 4 Amps |
|
Subdivision Modes |
Divides up to 32, selectable in 6 modes |
|
Micro Step Options |
8 kinds (1, 2/A, 2/B, 4, 8, 16, 32) |
|
Input Signal Isolation |
High-speed photoelectric separation |
|
Interface |
Full standard single pulse interface |
|
Offline Hold Function |
Yes |
|
Environmental Suitability |
Semi-enclosed body for harsh environments |
|
Power Lock Function |
Semi-automatic, energy-saving |
Pin Configuration

Technical Specs
|
Specification |
Details |
|
Operating Voltage |
9-40V DC |
|
Output Current |
0.7A-4.0A (selectable in 8 steps via DIP switches) |
|
Input Pulse Frequency |
Up to 20kHz |
|
Input Signal Levels |
5V signal levels |
|
Pulse Per Revolution |
200-6400 |
|
Logic Signal Current |
8A-15A |
|
Motor Compatibility |
Suitable for 2-phase and 4-phase stepper motors |
|
Protection Features |
Overcurrent, overheat protection |
|
Input Isolation |
Optically isolated |
|
Insulation Resistance |
500 megohms |
|
Supported Mode |
PUL/FIR mode |
|
Cost |
Low cost |
H-Bridge Circuit Configuration for the TB6600
The TB6600 stepper motor driver module is a serious component designed to control both 2-phase and 4-phase stepper motors, utilizing a bi-polar H-bridge configuration for efficient operation. This configuration employs MOSFET transistors to ensure high performance in terms of current handling and thermal stability. The module operates by interacting with two primary control pins: the step pin, which triggers motor stepping with each pulse, and the direction pin, which determines the motor’s rotational direction based on the voltage applied. Together, these inputs enable precise control over the motor's stepping sequence and direction of rotation.

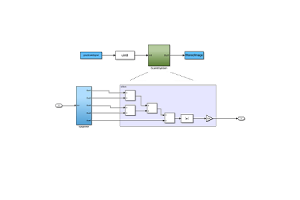
The circuit diagram highlights four key transistors, T1, T2, T3, and T4, arranged in an H-bridge structure. These MOSFETs are the backbone of the module’s operation, allowing for the bidirectional flow of current needed to drive the stepper motor. In addition, the diagram includes flyback diodes (D1, D2, D3, and D4), which are key for protecting the circuit from voltage spikes caused by the inductive load of the motor. These diodes prevent overcurrent and damage to sensitive components during operation. The A+, A-, B+, and B- terminals are used to connect the motor, ensuring accurate and controlled movement of the motor shaft.
How the H-Bridge Enables Motor Rotation?
The TB6600 driver operates through the coordinated action of the MOSFET transistors in the H-bridge. For example:
• Clockwise rotation occurs when transistors T1 and T4 are activated, directing current flow from A+ to A-.
• Counter-clockwise rotation happens when T2 and T3 are engaged, reversing the current flow from A- to A+.
This alternating activation of transistors ensures smooth bidirectional motion. To achieve optimal torque and efficient operation, precise timing and voltage regulation are essential.
Modes of Operation for Versatile Control
The TB6600 supports four distinct operating modes, each designed to balance torque, precision, and step size, depending on the application requirements:
• Wave Mode: In this mode, only one coil is energized at a time. Activating a single coil rotates the motor by 90 degrees in one direction while reversing the current rotates it in the opposite direction. By alternating between coils, the motor achieves continuous operation. This mode is simple but provides less torque compared to other modes.
• Full-Step Mode: Both coils are energized simultaneously in this mode, generating a stronger magnetic field. This results in increased torque, making it ideal for applications requiring more power and stability.
• Half-Step Mode: A combination of wave mode and full-step mode, this mode alternates between energizing a single coil and both coils. It effectively reduces the step size to 45 degrees, providing a balance between precision and torque. However, torque may vary depending on whether one or both coils are energized during a particular step.
• Microstep Mode: The most precise of all modes, microstep mode reduces the step size even further by carefully modulating the current through the motor phases. This is achieved using advanced circuitry to create smooth and gradual transitions between steps. This mode is ideal for applications requiring high precision and consistent torque, such as CNC machines or robotics.
Integrating TB6600 with Arduino UNO
Efficient control of stepper motors requires a combination of reliable hardware and carefully programmed software. The TB6600 stepper motor driver stands out as an excellent tool for operating 2-phase stepper motors. It supports multiple operational modes, such as wave, full-step, half-step, and micro-stepping. Its built-in protection features—including safeguards against low voltage, overcurrent, and overheating—make it a solid choice for projects demanding precision and durability.
To set up the TB6600 with an Arduino UNO, gather the following components:
• Arduino UNO R3
• TB6600 stepper motor driver (4A version)
• Stepper motor (with a recommended rating of 1.65A)
• Reliable power supply (e.g., a battery or regulated DC power source)
• Jumper wires
• Arduino IDE installed on your computer
To integrate the TB6600 with the Arduino, follow these detailed instructions
Connect Direction and Pulse Signals
• Link the DIR+ and PUL+ terminals on the TB6600 to Arduino pins 8 and 9, respectively. These pins send direction and pulse signals.
• Attach the DIR- and PUL- terminals to the ground (GND) pin of the Arduino.
• Connect the Motor to the TB6600: Attach the stepper motor wires to the TB6600 terminals.
• A+ and A- for one coil of the motor.
• B+ and B- for the other coil.
• Power the TB6600 Driver: Connect the VCC and GND pins on the TB6600 to your power supply. Ensure the voltage matches your motor and driver's requirements to avoid damage.

Adjusting Microstep Resolution
The TB6600 allows you to fine-tune the stepper motor's movement precision using the SW1 and SW2 switches. Adjust these switches as follows:
• ¼ Step Resolution: Set SW1 ON and SW2 OFF.
• ⅛ Step Resolution: Set SW1 OFF and SW2 ON.
• 1/32 Step Resolution: Set both SW1 and SW2 OFF.
• Full-Step Mode: Set both SW1 and SW2 ON.
Truth Table
|
SW2 |
Microstep Resolution |
|
OFF |
1/32 step |
|
ON |
1/8 step |
|
OFF |
1/4 step |
|
ON |
Full Step |
Switch adjustments allow you to optimize the balance between precision and speed based on your project’s needs.
To ensure your motor operates within safe current limits, the TB6600 features additional switches (SW4 and SW6) for adjusting current flow. These settings are useful for:
• Preventing overload damage.
• Maintaining consistent motor performance.
• Always verify that the motor current stays below the driver’s maximum of 4A to protect both components.
• Control Motor Direction: If you want the motor to rotate anticlockwise, modify the state of the DIR+ pin in your Arduino code.
• Testing and Troubleshooting: After completing the setup, upload a basic stepper motor control sketch to verify the wiring and driver functionality.
• Avoid Overheating: Ensure proper ventilation for the TB6600 driver, especially in high-current applications.
Applications
The TB6600 module plays an active role across numerous sectors where meticulous motor control is used. Its adaptability shines through in various implementations that highlight its unique capabilities:
Antenna Positioning
In the field of telecommunications, achieving optimal antenna alignment is compulsory for quality signal reception and transmission. The TB6600 facilitates precision movement, thereby enhancing the effectiveness of communication systems.
Stepper Motor Management
Within automation and robotics, precise stepper motor handling is achieved through the TB6600, allowing you to refine movement precision and bolster system reliability.
CNC Operations
For Computer Numerical Control (CNC) machines, the TB6600 enhances intricate cutting and milling processes, enabling you to maintain high levels of accuracy and repeatable precision in their work.
3D Printing Precision
In additive manufacturing, especially 3D printing, the TB6600 offers detailed motor control, supporting the accurate positioning of print heads required for crafting complex shapes and forms.
Complex Motor Control
The module is valuable for intricate motor control tasks within complex automation systems, enhancing efficiency and enabling refined management.
Control of Speed, Position, and Rotation
The TB6600 excels in scenarios requiring exact speed and rotational control, mostly used for optimizing performance in constantly changing environments.
Imaging Devices and Banking Systems
The module supports the reliable operation of cameras and ATMs by ensuring smooth, exact motor movements, which extends the devices' operational lifespan.
Precision in Engraving Devices
For engraving tools and machinery, the TB6600 provides the precise control necessary for executing finely detailed designs, a dangerous factor in industries where precision and detail are dominant.
About us
ALLELCO LIMITED
Read more
Quick inquiry
Please send an inquiry, we will respond immediately.
Frequently Asked Questions [FAQ]
1. What power supply should I use for the TB6600 driver?
The TB6600 stepper motor driver works with a power supply voltage between 8V and 45V.
2. How can I control the stepper motor speed with the TB6600?
The TB6600 uses pulse-width modulation (PWM) to adjust motor speed. You can change the speed by modifying the PWM frequency.
3. Can the TB6600 support high-current stepper motors?
Yes, the TB6600 can handle up to 4.5A, making it compatible with stepper motors rated up to this current.
4. How do I reverse the motor direction using the TB6600?
To reverse the motor direction, switch the input signal sequence on the control pins (e.g., IN1-IN2-IN3-IN4 for forward, IN4-IN3-IN2-IN1 for reverse).
5. Can I connect a stepper motor with more than 4 wires to the TB6600?
The TB6600 is made for 4-wire stepper motors. If your motor has more than 4 wires, you’ll need a different driver.
6. Is the TB6600 compatible with a NEMA23 stepper motor?
The TB6600 works well with NEMA17 motors but is generally unsuitable for NEMA23 motors because of their higher current requirements.

A Complete Guide to the E18-D80NK Adjustable IR Sensor
on December 12th
DS3231 RTC Module Explained: Pin Diagram, Specs, and Microcontroller Interfacing
on December 12th
Popular Posts
-

Complex Instruction Set Computers: How They Changed Computing?
on April 18th 147749
-

USB-C Pinout and Features
on April 18th 111904
-
Using Xilinx Unified Simulation Primitives: A Comprehensive Guide to FPGA Design and Simulation
on April 18th 111349
-

Power Supply Voltages in Electronics: Meaning of VCC, VDD, VEE, VSS, and GND
on April 18th 83714
-

RJ45 Connector Guide: Pinout, Wiring, Cable Types, and Uses
on January 1th 79502
-

The Ultimate Guide to Wire Color Codes in Modern Electrical Systems
The way our electrical systems use colors isn’t just for looks. Each wire color now indicates a specific function, making it easier to identify and handle electrical components correctly during ins...on January 1th 66869
-

Quality (Q) Factor: Equations and Applications
The quality factor, or 'Q', is important when checking how well inductors and resonators work in electronic systems that use radio frequencies (RF). 'Q' measures how well a circuit minimizes energy...on January 1th 63004
-

Purge Valve Guide: Function, Symptoms, Testing, and Replacement for Optimal Engine Performance
The purge valve is a key part of a car’s system that helps keep the air clean by managing fuel vapors before they can escape into the atmosphere. This not only helps the environment by reducing pol...on January 1th 62943
-

Achieving Peak Performance with the Maximum Power Transfer Theorem
The Maximum Power Transfer Theorem explains how energy from a source, such as a battery or generator, flows to a connected load. It shows the exact condition where the load receives the most power....on January 1th 54076
-

A23 Battery Specifications and Compatibility
The A23 battery is a small, cylinder-shaped battery with high voltage. Also called 23A, 23AE, or MN21, it runs at 12 volts and much higher than AA or AAA batteries. Its special design make...on January 1th 52088
HOT Part Number
-

BD9B100MUV-E2
Rohm Semiconductor
IC REG BUCK ADJ 1A 16VQFN
UPD70F3539AF5A9-PN7-Q-A
Renesas Electronics America Inc
IC MICROCONTROLLER
18081A621JAT2A
KYOCERA AVX
CAP CER 620PF 100V NP0 1808
FDN340P
onsemi
MOSFET P-CH 20V 2A SUPERSOT3
70231-101
Amphenol ICC (FCI)
CONN RCPT BLADE PWR 8POS EDGE MT
MPSW42RLRAG
onsemi
TRANS NPN 300V 0.5A TO92
MC7824BT
onsemi
IC REG LINEAR 24V 1A TO220AB
AD8009ARZ-REEL
Analog Devices Inc.
IC OPAMP CFA 1 CIRCUIT 8SOIC
LT1815CS5#TRPBF
Analog Devices Inc.
IC OPAMP VFB 1 CIRCUIT TSOT23-5
DG411DYZ
Renesas Electronics America Inc
IC SWITCH SPST-NCX4 35OHM 16SOIC
VFT2060C-M3/4W
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 20A 60V ITO-220AB
TSX562AIYST
STMicroelectronics
IC CMOS 2 CIRCUIT 8MINISO
MR256D08BMA45
Everspin Technologies Inc.
IC RAM 256KBIT PARALLEL 48FBGA
VSC3312YYP-01
Microchip Technology
IC SWITCH 16X16 6.5GBPS 196FCBGA
XC68HC908GP20CFB
Motorola
TSG 8BIT20K FLASH
CSR8811A08-ICXR-R
Qualcomm
IC RF TXRX+MCU BLUETOOTH
MPSW05
onsemi
TRANS NPN 60V 0.5A TO92
1N4055R
Solid State Inc.
DIODE GEN PURP REV 900V 275A DO9 -

ASX342ATSC00XPED0-DP
onsemi
IMAGE SENSOR VGA 1/4 CIS SOC
0433.125NR
Littelfuse Inc.
FUSE BOARD MNT 125MA 125VAC/VDC
1SMA5941BT3G
onsemi
DIODE ZENER 47V 1.5W SMA
DCP010512BP-U/700
Texas Instruments
DC DC CONVERTER 12V 1W
1-1734344-1
TE Connectivity AMP Connectors
CONN D-SUB HD RCPT 15P R/A SLDR
KSD1621STF
onsemi
TRANS NPN 25V 2A SOT89-3
BQ24161RGET
Texas Instruments
IC BATT CHG LI-ION 1CELL 24VQFN
BTA26-600BW
STMicroelectronics
TRIAC ALTERNISTOR 600V 25A TOP3
NCP1239DD65R2G
onsemi
IC OFFLINE SWITCH FLYBACK 7SOIC
TMS320TCI6482BZTZA
Texas Instruments
TMS320 - DIGITAL SIGNAL PROCESSO
BQ20Z90DBTR-V150
Texas Instruments
IC GAS GAUGE LI-ION 30TSSOP
PCMB104T-1R0MT
Susumu
FIXED IND 1UH 18A 3.3 MOHM SMD
CY29942AXCT
Infineon Technologies
IC CLK BUFFER 1:18 200MHZ 32TQFP
CC0402KRX7R9BB561
YAGEO
CAP CER 560PF 50V X7R 0402
STPS20M60SG-TR
STMicroelectronics
DIODE SCHOTTKY 60V 20A D2PAK
AT25010N-10SC-2.7
Microchip Technology
IC EEPROM 1KBIT SPI 3MHZ 8SOIC
04023A1R0CAT4A
KYOCERA AVX
CAP CER 1PF 25V C0G/NP0 0402
ISL6327IRZ
Intersil
SWITCHING CONTROLLER, VOLTAGE-MO -

LQW18AN75NG0ZD
Murata Electronics
FIXED IND
DFA100BA160
SanRex Corporation
DIODE MODULE 1600V 100A
BAR46AFILM
STMicroelectronics
DIODE ARRAY SCHOTTKY 100V SOT23
MAX825SEUK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
MMST2222A-7-F
Diodes Incorporated
TRANS NPN 40V 0.6A SOT323
FODM8801AR2
onsemi
OPTOISO 3.75KV TRANS 4-MINI-FLAT
FJV1845FMTF
Fairchild Semiconductor
SMALL SIGNAL BIPOLAR TRANSISTOR,
EVK105RH5R1JW-F
Taiyo Yuden
CAP CER 5.1PF 16V R2H 0402
6651170-3
TE Connectivity AMP Connectors
CONN EDGE DUAL FMALE 4POS 0.508
KSZ8893FQLI-FX
Microchip Technology
IC SWITCH ETH 3PORT 128QFP
170M6340
Eaton - Bussmann Electrical Division
FUSE SQUARE 400A 1.3KVAC RECT
BCM20741A2KFB1G
Broadcom Limited
SINGLE-CHIP BLUETOOTH
MAX3443EASA+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER HALF 1/1 8SOIC
GRM0335C1H9R3DA01D
Murata Electronics
CAP CER 9.3PF 50V C0G/NP0 0201
TNY175PN
Power Integrations
11.5 W (85-265 VAC) 15 W (230 VA
742700726
Würth Elektronik
FERRITE CORE 278 OHM SOLID 4MM
DM74S20N
onsemi
IC GATE NAND 2CH 4-INP 14DIP
P4SMA56CA-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 47.8VWM 77VC DO214AC