Pulse Width Modulation (PWM) Explained
Pulse Width Modulation (PWM) is a simple and efficient way you can control electrical power using digital signals. Instead of changing the supply voltage, you adjust how long the signal stays ON and OFF within each cycle to control power delivery. This article helps you understand how PWM works, how duty cycle affects output, and why PWM is widely used in electronics and control systems. You will also see how PWM is applied in controllers, waveform types, and applications.Catalog

Figure 1. Pulse Width Modulation Concept
What is Pulse Width Modulation?
Pulse Width Modulation (PWM) is a digital control technique used to regulate electrical power delivered to a load by varying the proportion of ON time within a fixed switching period. Instead of changing the supply voltage level, PWM controls the effective power by rapidly switching the signal between fully ON and fully OFF states. This approach allows efficient power regulation with minimal energy loss, making PWM widely used in motor drives, LED control, power converters, and embedded control systems.
How Pulse Width Modulation Works?
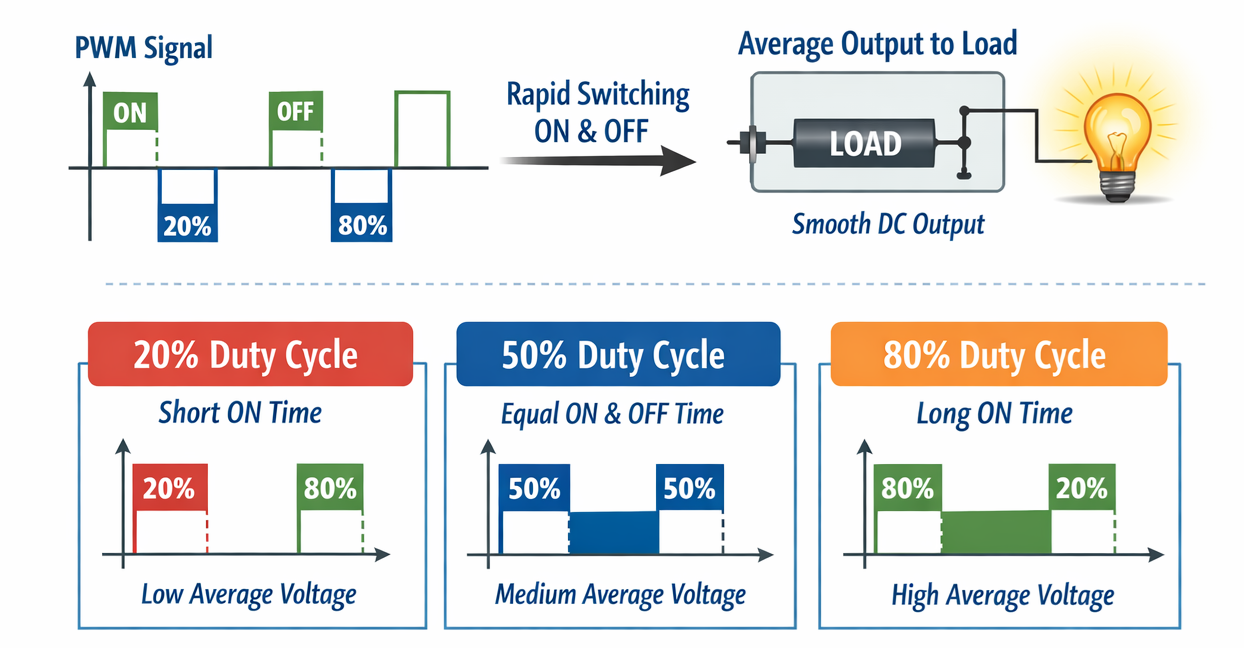
Figure 2. PWM Working Principle
Pulse Width Modulation works by repeatedly turning the output signal ON and OFF at a constant frequency. During each switching cycle, the signal remains ON for a specific duration and OFF for the remainder of the cycle. The ratio of ON time to the total cycle time is known as the duty cycle, and it directly determines the average voltage and current delivered to the load. A higher duty cycle increases delivered power, while a lower duty cycle reduces it.
Because the switching frequency is typically much higher than the electrical or mechanical response of the load, the load responds to the average value of the signal rather than individual pulses. As a result, PWM enables smooth and precise power control using digital signals without requiring variable voltage sources.
PWM Signal Waveform Characteristics
|
PWM
Characteristic |
Description |
|
Pulse Width |
ON time
within one PWM cycle, from 0 microseconds to full period. |
|
Duty Cycle |
Percentage of
ON time per cycle, from 0 percent to 100 percent. |
|
PWM Frequency |
Number of
cycles per second, commonly 500 Hz to 100 kHz. |
|
PWM Period |
Total cycle
time, typically 1 millisecond to 10 microseconds. |
|
Signal
Amplitude |
Voltage level
of the PWM signal, usually 3.3 V, 5 V, or 12 V. |
|
High Voltage
Level |
Voltage
during ON state, equal to supply voltage. |
|
Low Voltage
Level |
Voltage
during OFF state, typically 0 V. |
|
Rise Time |
Time to
switch from low to high, often 10 ns to 1 µs. |
|
Fall Time |
Time to
switch from high to low, often 10 ns to 1 µs. |
|
Switching
Speed |
Maximum rate
of state change, supporting high-frequency PWM. |
|
Resolution |
Number of
duty steps, commonly 8 bit or 10 bit. |
|
Signal
Stability |
Consistency
of frequency and duty cycle over time. |
|
Jitter |
Small timing
variation, usually less than 1 percent. |
|
Dead Time |
Intentional
delay between switching, typically 100 ns to 5 µs. |
|
Harmonics |
High-frequency
components generated by fast switching. |
|
Power Control |
Output power
varies linearly with duty cycle. |
|
Load Response |
Ability to
maintain waveform under load changes. |
|
Filtering
Output |
Filtered PWM
produces smooth DC voltage. |
|
Noise
Immunity |
Resistance to
interference improves with clean edges. |
Types of Pulse Width Modulation
Pulse Width Modulation can be classified into different control strategies based on how the output waveform is shaped. These PWM types focus on modulation concepts and control algorithms that affect output voltage, harmonic performance, and efficiency.
Single-Pulse Width Modulation (Single-Pulse PWM)
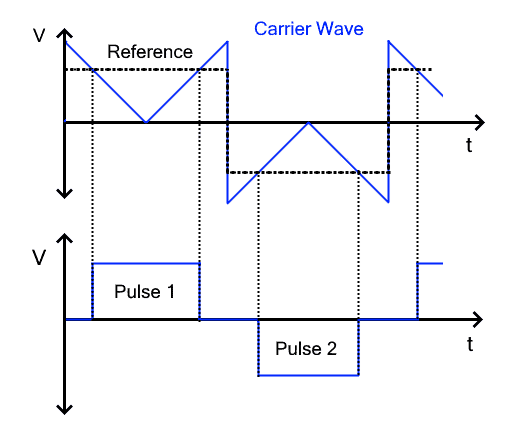
Figure 3. Single-Pulse PWM Waveform
Single-Pulse PWM uses one switching pulse per half cycle of the output waveform. The width of this single pulse is adjusted to control the output voltage level. Because only one switching event occurs per half cycle, switching losses remain low. However, this control strategy produces higher harmonic distortion and is mainly used in low-frequency and basic power-control applications where simplicity is prioritized over waveform quality.
Multiple-Pulse Width Modulation (Multiple-Pulse PWM)

Figure 4. Multiple-Pulse PWM Waveform
Multiple-Pulse PWM divides each half cycle into several smaller pulses instead of a single large pulse. Increasing the number of pulses spreads harmonic energy toward higher frequencies, improving output waveform quality. This PWM type offers a balance between reduced harmonic distortion and manageable switching losses, making it suitable for industrial power converters and motor-drive systems.
Sinusoidal Pulse Width Modulation (SPWM)
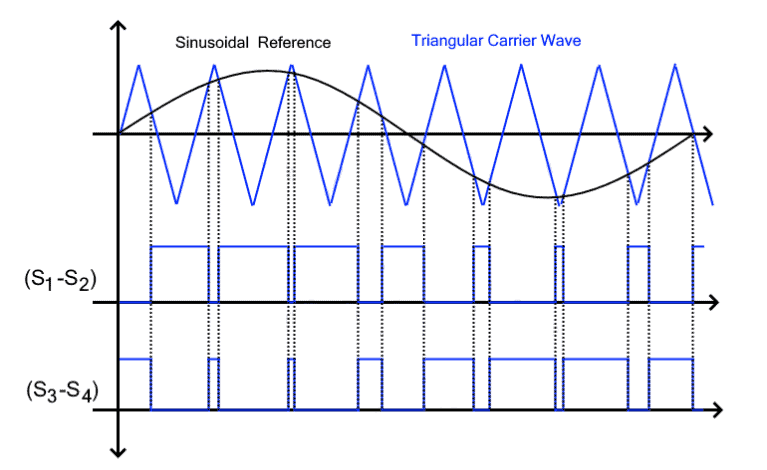
Figure 5. Sinusoidal PWM Generation
Sinusoidal PWM is a modulation strategy that generates pulses based on a sinusoidal reference signal. The pulse widths vary according to the instantaneous amplitude of the reference waveform, allowing the output to approximate a sine wave after filtering. SPWM is widely used in inverters, motor drives, and renewable-energy systems because it provides good harmonic performance with moderate control complexity.
Space Vector Pulse Width Modulation (SVPWM)
Space Vector PWM is an advanced control strategy that uses a mathematical vector model of the inverter rather than direct waveform comparison. It selects optimal switching states to approximate a rotating reference vector in the voltage space. Compared to SPWM, SVPWM improves DC bus voltage utilization and further reduces harmonic distortion, making it suitable for high-performance motor drives and precision industrial control systems.
PWM Generation Methods
PWM signals can also be categorized by how the pulses are generated and aligned in hardware. These PWM generation methods focus on timer operation, switching symmetry, and pulse placement, rather than the modulation strategy itself.
Single-Edge PWM (Edge-Aligned PWM)
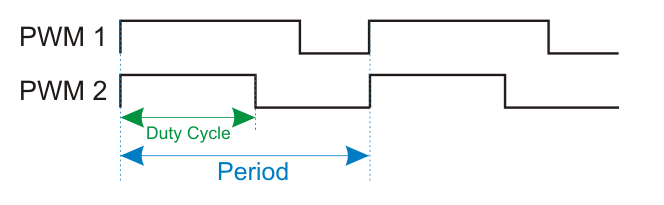
Figure 6. Edge-Aligned PWM Timing
Single-Edge PWM aligns all pulses to one edge of the switching period, typically the rising edge. The duty cycle is adjusted by extending or shortening the pulse from this fixed edge. This generation method is simple to implement using hardware timers and comparators, but its asymmetric switching pattern can increase harmonic distortion and electromagnetic interference.
Double-Edge PWM (Center-Aligned PWM)
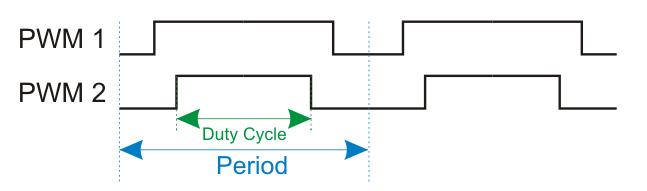
Figure 7. Center-Aligned PWM Timing
Double-Edge PWM centers the pulse within the switching period by switching ON and OFF symmetrically around the midpoint. This symmetric timing reduces harmonic distortion and electromagnetic interference while improving current balance. Because of these advantages, center-aligned PWM is commonly used in precision motor drives and high-performance power-control applications.
Carrier-Based PWM (Comparator PWM)
Carrier-Based PWM generates pulses by comparing a reference signal with a high-frequency carrier waveform using a comparator. When the reference exceeds the carrier, the output switches ON. This method serves as the hardware generation foundation for many PWM control strategies, including SPWM, and is widely implemented in microcontrollers, DSPs, and industrial controllers.
PWM in Microcontrollers and Controllers
Pulse Width Modulation in Arduino
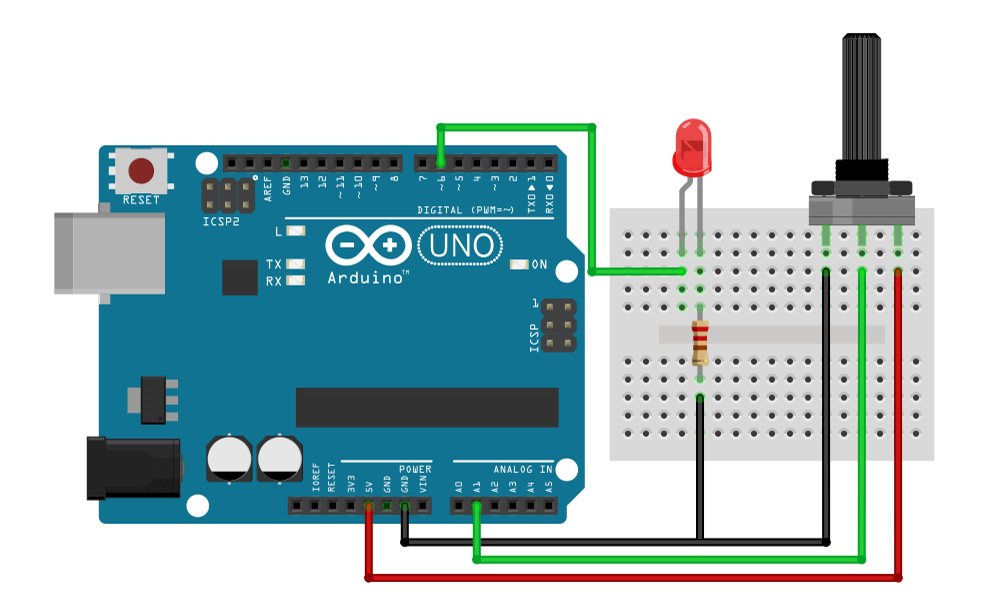
Figure 8. Arduino PWM LED Control
Arduino generates Pulse Width Modulation using internal hardware timers that switch the output pin between HIGH and LOW states. The duty cycle is adjusted through software, which directly controls the average voltage delivered to the load. By changing the duty cycle, Arduino can smoothly vary LED brightness or motor speed without changing the supply voltage. The PWM frequency is usually fixed by the timer settings, ensuring stable operation during control tasks. As shown in figure, the Arduino PWM pin drives an LED through a resistor, clearly demonstrating how duty cycle variation changes the visible brightness.
Pulse Width Modulation in ESP32
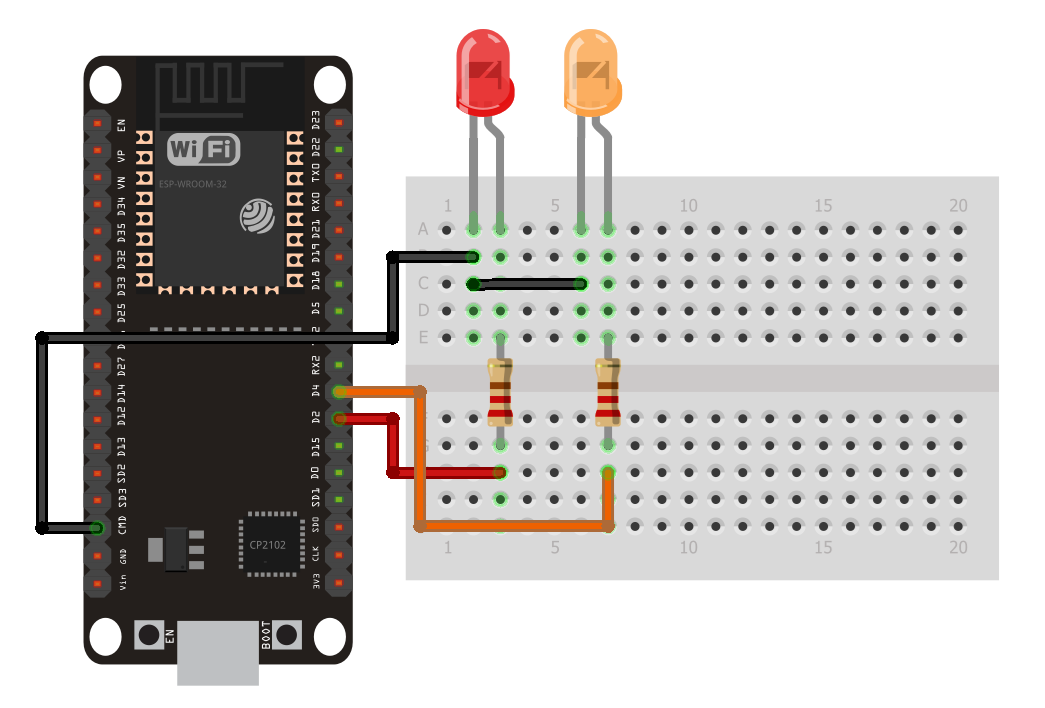
Figure 9. ESP32 PWM Output Example
ESP32 provides advanced Pulse Width Modulation using dedicated PWM hardware modules. It supports higher resolution, multiple independent PWM channels, and flexible frequency control without placing load on the CPU. This allows precise and responsive power control for motors, LEDs, and IoT devices. ESP32 PWM is especially suitable for applications that require fast response and accurate output regulation. Figure 9 shows the ESP32 controlling multiple LEDs with different PWM duty cycles, illustrating how each channel independently adjusts output power.
Pulse Width Modulation in PLCs
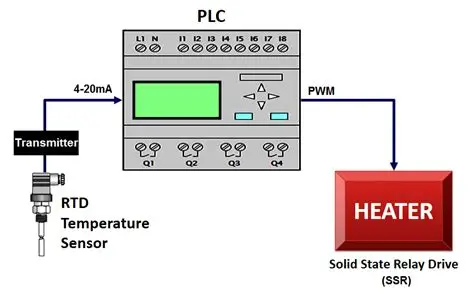
Figure 10. PLC PWM Heater Control
PLCs use Pulse Width Modulation to control industrial loads such as heaters, motors, and actuators with high reliability. The PWM output is adjusted based on sensor feedback or programmed control logic to regulate power accurately. This method allows smooth control while minimizing electrical stress on switching devices. PLC-based PWM is designed to operate reliably in electrically noisy and harsh industrial environments. As shown in figure, the PLC uses a PWM signal to drive a solid-state relay that controls heater power based on temperature feedback.
Applications of Pulse Width Modulation
Pulse Width Modulation is widely used to control power efficiently and precisely in both low-power and high-power electronic applications.
1. Motor Speed Control
PWM is commonly used in DC motors, servo motors, and BLDC motor drives to control speed and torque by varying the average voltage supplied to the motor. This method provides smooth speed control and high efficiency in robotics, industrial automation, and electric vehicles.
2. LED Dimming and Lighting Control
In LED drivers, PWM controls brightness by rapidly switching the LED on and off while maintaining a constant current level. This prevents color shift, improves efficiency, and allows precise brightness adjustment in displays, automotive lighting, and smart lighting systems.
3. Power Supplies and Voltage Regulation
PWM is a core technique in switch-mode power supplies, DC-DC converters, and inverters. It helps regulate output voltage and current efficiently, reducing heat generation compared to linear regulators.
4. Audio Signal Generation
PWM is used in Class-D audio amplifiers to convert audio signals into high-frequency switching signals. This enables high-power audio amplification with low power loss and compact circuit design.
5. Heating and Temperature Control
PWM controls power delivered to heaters, heating elements, and temperature control systems by adjusting the on-off time of the supply. This provides stable temperature regulation in industrial heaters, soldering stations, and home appliances.
6. Battery Charging and Energy Management
PWM is applied in battery chargers and solar charge controllers to manage charging current and voltage. This improves charging efficiency, protects batteries from overcharging, and extends battery life.
7. Microcontroller and Embedded Systems
PWM outputs from microcontrollers are widely used to generate analog-like signals, control actuators, and interface with external devices. This makes PWM important in embedded systems, IoT devices, and control applications.
PWM vs Linear Control vs Phase Angle Control
|
Parameter |
PWM
Control |
Linear
Control |
Phase
Angle Control |
|
Basic Control
Method |
Output is
controlled by varying duty cycle |
Output is
controlled by dropping voltage linearly |
Output is
controlled by delaying AC waveform conduction |
|
Typical Supply
Type |
DC power
supply |
DC power
supply |
AC power
supply |
|
Control Signal
Frequency |
Commonly 1
kHz to 100 kHz |
Zero
switching frequency |
Line
frequency of 50 Hz or 60 Hz |
|
Power Efficiency |
Efficiency
typically 85 percent to 98 percent |
Efficiency
typically 30 percent to 60 percent |
Efficiency
typically 70 percent to 90 percent |
|
Heat Generation |
Heat loss is
low due to switching operation |
Heat loss is
high due to voltage drop |
Heat loss is
moderate during partial conduction |
|
Output Voltage
Regulation |
Average
voltage is controlled by duty cycle |
Output
voltage follows control input directly |
RMS voltage
varies with firing angle |
|
Control Resolution |
High
resolution with digital timers |
Very high
resolution with analog control |
Medium
resolution limited by AC waveform |
|
Circuit Complexity |
Medium
complexity with switching components |
Simple
circuit with pass element |
Medium
complexity using TRIAC or SCR |
|
EMI and Noise
Level |
EMI is
moderate to high without filtering |
EMI is very
low |
EMI is high
due to waveform distortion |
|
Typical Switching
Device |
MOSFET or
IGBT |
BJT or linear
regulator |
TRIAC or SCR |
|
Response Speed |
Response time
is in microseconds |
Response time
is in milliseconds |
Response time
depends on AC zero crossing |
|
Load Compatibility |
Best for
motors LEDs and power converters |
Best for low
power analog loads |
Best for
lamps heaters and AC motors |
|
Power Rating Range |
From 1 watt
to several kilowatts |
Usually below
50 watts |
Commonly from
100 watts to several kilowatts |
|
Control Accuracy |
Accuracy
depends on timer resolution |
Very accurate
and smooth control |
Accuracy
affected by line voltage variation |
|
Common Applications |
Motor speed
control SMPS LED dimming |
Audio
amplifiers sensor circuits |
Light dimmers
fan regulators heater control |
Conclusion
Pulse Width Modulation provides efficient and accurate power control by varying the duty cycle of a switching signal. Different PWM types and generation methods affect waveform quality, efficiency, and system performance. PWM is widely used in microcontrollers, PLCs, and power electronics for motors, lighting, power conversion, and temperature control. Its simplicity and efficiency make it essential in modern electronic applications.
About us
ALLELCO LIMITED
Read more
Quick inquiry
Please send an inquiry, we will respond immediately.
Frequently Asked Questions [FAQ]
1. Can PWM damage motors or LEDs if used incorrectly?
Yes, improper PWM settings such as very high frequency, poor filtering, or incorrect driver selection can cause overheating, noise, or shortened lifespan. Using the correct PWM frequency and proper driver circuits prevents damage.
2. What PWM frequency is best for motors, LEDs, and heaters?
Motors typically use PWM frequencies between 1 kHz and 20 kHz, LEDs often use 500 Hz to 5 kHz, and heaters can use very low frequencies such as 1 Hz to 100 Hz. The ideal frequency depends on the load type and application.
3. Do I need a filter when using PWM for analog signals?
Yes, a low-pass filter is recommended when PWM is used to generate analog-like voltages. Filtering smooths the PWM waveform and reduces ripple, making it suitable for sensitive circuits.
4. What components are required to build a PWM control circuit?
A basic PWM system requires a controller, switching device, driver circuit, power supply, and load. Additional components such as filters, protection circuits, and heat sinks may be needed depending on power level.
5. Does PWM create electrical noise or interference?
PWM switching can generate electromagnetic interference if not properly designed. Using shielding, filtering, proper grounding, and correct switching frequency helps reduce noise issues.

AD8542AR Dual Operational Amplifier Technical Overview
on January 13th
Advantages and Disadvantages of Three-Phase Transformer Connections
on January 12th
Popular Posts
-

Complex Instruction Set Computers: How They Changed Computing?
on April 18th 147749
-

USB-C Pinout and Features
on April 18th 111919
-
Using Xilinx Unified Simulation Primitives: A Comprehensive Guide to FPGA Design and Simulation
on April 18th 111349
-

Power Supply Voltages in Electronics: Meaning of VCC, VDD, VEE, VSS, and GND
on April 18th 83714
-

RJ45 Connector Guide: Pinout, Wiring, Cable Types, and Uses
on January 1th 79502
-

The Ultimate Guide to Wire Color Codes in Modern Electrical Systems
The way our electrical systems use colors isn’t just for looks. Each wire color now indicates a specific function, making it easier to identify and handle electrical components correctly during ins...on January 1th 66872
-

Quality (Q) Factor: Equations and Applications
The quality factor, or 'Q', is important when checking how well inductors and resonators work in electronic systems that use radio frequencies (RF). 'Q' measures how well a circuit minimizes energy...on January 1th 63005
-

Purge Valve Guide: Function, Symptoms, Testing, and Replacement for Optimal Engine Performance
The purge valve is a key part of a car’s system that helps keep the air clean by managing fuel vapors before they can escape into the atmosphere. This not only helps the environment by reducing pol...on January 1th 62951
-

Achieving Peak Performance with the Maximum Power Transfer Theorem
The Maximum Power Transfer Theorem explains how energy from a source, such as a battery or generator, flows to a connected load. It shows the exact condition where the load receives the most power....on January 1th 54077
-

A23 Battery Specifications and Compatibility
The A23 battery is a small, cylinder-shaped battery with high voltage. Also called 23A, 23AE, or MN21, it runs at 12 volts and much higher than AA or AAA batteries. Its special design make...on January 1th 52092
HOT Part Number
-

BD9B100MUV-E2
Rohm Semiconductor
IC REG BUCK ADJ 1A 16VQFN
UPD70F3539AF5A9-PN7-Q-A
Renesas Electronics America Inc
IC MICROCONTROLLER
18081A621JAT2A
KYOCERA AVX
CAP CER 620PF 100V NP0 1808
FDN340P
onsemi
MOSFET P-CH 20V 2A SUPERSOT3
70231-101
Amphenol ICC (FCI)
CONN RCPT BLADE PWR 8POS EDGE MT
MPSW42RLRAG
onsemi
TRANS NPN 300V 0.5A TO92
MC7824BT
onsemi
IC REG LINEAR 24V 1A TO220AB
AD8009ARZ-REEL
Analog Devices Inc.
IC OPAMP CFA 1 CIRCUIT 8SOIC
LT1815CS5#TRPBF
Analog Devices Inc.
IC OPAMP VFB 1 CIRCUIT TSOT23-5
DG411DYZ
Renesas Electronics America Inc
IC SWITCH SPST-NCX4 35OHM 16SOIC
VFT2060C-M3/4W
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 20A 60V ITO-220AB
TSX562AIYST
STMicroelectronics
IC CMOS 2 CIRCUIT 8MINISO
MR256D08BMA45
Everspin Technologies Inc.
IC RAM 256KBIT PARALLEL 48FBGA
VSC3312YYP-01
Microchip Technology
IC SWITCH 16X16 6.5GBPS 196FCBGA
XC68HC908GP20CFB
Motorola
TSG 8BIT20K FLASH
CSR8811A08-ICXR-R
Qualcomm
IC RF TXRX+MCU BLUETOOTH
MPSW05
onsemi
TRANS NPN 60V 0.5A TO92
1N4055R
Solid State Inc.
DIODE GEN PURP REV 900V 275A DO9 -

ASX342ATSC00XPED0-DP
onsemi
IMAGE SENSOR VGA 1/4 CIS SOC
0433.125NR
Littelfuse Inc.
FUSE BOARD MNT 125MA 125VAC/VDC
1SMA5941BT3G
onsemi
DIODE ZENER 47V 1.5W SMA
DCP010512BP-U/700
Texas Instruments
DC DC CONVERTER 12V 1W
1-1734344-1
TE Connectivity AMP Connectors
CONN D-SUB HD RCPT 15P R/A SLDR
KSD1621STF
onsemi
TRANS NPN 25V 2A SOT89-3
BQ24161RGET
Texas Instruments
IC BATT CHG LI-ION 1CELL 24VQFN
BTA26-600BW
STMicroelectronics
TRIAC ALTERNISTOR 600V 25A TOP3
NCP1239DD65R2G
onsemi
IC OFFLINE SWITCH FLYBACK 7SOIC
TMS320TCI6482BZTZA
Texas Instruments
TMS320 - DIGITAL SIGNAL PROCESSO
BQ20Z90DBTR-V150
Texas Instruments
IC GAS GAUGE LI-ION 30TSSOP
PCMB104T-1R0MT
Susumu
FIXED IND 1UH 18A 3.3 MOHM SMD
CY29942AXCT
Infineon Technologies
IC CLK BUFFER 1:18 200MHZ 32TQFP
CC0402KRX7R9BB561
YAGEO
CAP CER 560PF 50V X7R 0402
STPS20M60SG-TR
STMicroelectronics
DIODE SCHOTTKY 60V 20A D2PAK
AT25010N-10SC-2.7
Microchip Technology
IC EEPROM 1KBIT SPI 3MHZ 8SOIC
04023A1R0CAT4A
KYOCERA AVX
CAP CER 1PF 25V C0G/NP0 0402
ISL6327IRZ
Intersil
SWITCHING CONTROLLER, VOLTAGE-MO -

LQW18AN75NG0ZD
Murata Electronics
FIXED IND
DFA100BA160
SanRex Corporation
DIODE MODULE 1600V 100A
BAR46AFILM
STMicroelectronics
DIODE ARRAY SCHOTTKY 100V SOT23
MAX825SEUK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
MMST2222A-7-F
Diodes Incorporated
TRANS NPN 40V 0.6A SOT323
FODM8801AR2
onsemi
OPTOISO 3.75KV TRANS 4-MINI-FLAT
FJV1845FMTF
Fairchild Semiconductor
SMALL SIGNAL BIPOLAR TRANSISTOR,
EVK105RH5R1JW-F
Taiyo Yuden
CAP CER 5.1PF 16V R2H 0402
6651170-3
TE Connectivity AMP Connectors
CONN EDGE DUAL FMALE 4POS 0.508
KSZ8893FQLI-FX
Microchip Technology
IC SWITCH ETH 3PORT 128QFP
170M6340
Eaton - Bussmann Electrical Division
FUSE SQUARE 400A 1.3KVAC RECT
BCM20741A2KFB1G
Broadcom Limited
SINGLE-CHIP BLUETOOTH
MAX3443EASA+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER HALF 1/1 8SOIC
GRM0335C1H9R3DA01D
Murata Electronics
CAP CER 9.3PF 50V C0G/NP0 0201
TNY175PN
Power Integrations
11.5 W (85-265 VAC) 15 W (230 VA
742700726
Würth Elektronik
FERRITE CORE 278 OHM SOLID 4MM
DM74S20N
onsemi
IC GATE NAND 2CH 4-INP 14DIP
P4SMA56CA-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 47.8VWM 77VC DO214AC