
SPI Explained: A Quick Guide to Serial Peripheral Interface
This article is about SPI (Serial Peripheral Interface). It covers the main signals, different types of SPI, and what each one does. It also explains the role of each pin, how data moves inside a microcontroller, and how clock settings control the four SPI modes. The article highlights how SPI communication works, its advantages and disadvantages, and its many uses in memory, sensors, displays, wireless modules, motors, audio systems, industrial machines, and cars.Catalog

Figure 1. SPI Configuration
What is SPI?
The Serial Peripheral Interface (SPI) is a communication method used when devices need to exchange data quickly over short distances. It works in a synchronized, full-duplex manner, meaning data moves in both directions at the same time while staying aligned with a shared clock signal. The connection relies on four main signal lines: SCLK, MOSI, MISO, and CS (Chip Select).
With every tick of the clock, bits are shifted in and out. This predictable rhythm removes the need for complicated bus arbitration. Because both sending and receiving happen simultaneously, latency is lower than with many other serial interfaces, which is useful in embedded work.
SPI remains simple in hardware because it is based on shift registers and straightforward control signals. At the same time, it can scale easily, since each peripheral is addressed by its own CS line. This combination of speed, determinism, and low hardware cost explains why SPI is widely used across many fields.
Types of SPI
Different systems adopt SPI in slightly different forms depending on how many devices are connected and how much bandwidth is needed.
Standard SPI

Figure 2. Standard SPI
Standard SPI is the most common form, where a single master device communicates with multiple slaves. Each slave is given a dedicated chip-select (CS) line, which ensures that only one responds at a time. This method is simple to implement and keeps communication predictable because the master always controls the clock and data flow. The main advantage is its reliability across many types of peripherals, but it requires additional pins as more devices are added.
Single SPI (SSI)
Single SPI, sometimes called SSI, is the most basic setup with only one master and one slave. Because there is no need for multiple CS lines, wiring is minimal and stability is high. This design is ideal for direct connections to a single memory chip or sensor that requires consistent communication. While it lacks scalability, its simplicity makes it efficient in small systems where only one peripheral is needed.
Multi-Master SPI
In Multi-Master SPI, more than one master can control the bus, though only one may transmit at a given moment. Arbitration logic ensures that collisions do not occur, but this adds extra complexity to both hardware and software. It is considered a variant of SPI because it still uses the same clock, MOSI, MISO, and CS signals, just managed by multiple masters. This approach is rarely used in embedded systems but can be valuable in specialized networks where control must be shared.
Daisy-Chain SPI

Figure 3. Daisy-Chain SPI
Daisy-Chain SPI reduces the number of CS lines by connecting slave devices in a series. Instead of being selected individually, data flows from the master through one slave to the next until it reaches the final device. This setup lowers pin usage, which is helpful in systems with limited GPIO availability. However, it introduces longer delays because each device must forward data, making it less suitable for high-speed operations.
Quad SPI (QSPI)

Figure 4. Quad SPI (QSPI)
Quad SPI is an enhanced version of SPI designed for high-bandwidth applications. It expands the data path by using four lines instead of just one, allowing more bits to be transferred per clock cycle. This greatly improves throughput while keeping the clock frequency lower, which helps with signal quality. QSPI is most often found in serial flash memories and display modules where large amounts of data must be transferred quickly.
Shared SPI Bus
In a Shared SPI Bus configuration, several devices use the same data lines, but only one device communicates at a time. The master controls which device is active by carefully managing CS signals and firmware rules. This saves wiring and reduces pin count compared to standard SPI, making it efficient in compact systems. The downside is that software must strictly prevent two devices from transmitting at once, which increases control complexity.
Enhanced SPI (eSPI)
Enhanced SPI, or eSPI, is a modern standard created for computers and servers. It extends traditional SPI by supporting faster speeds, multiple logical channels, and extra features such as isolation and sideband signaling. These improvements make it more secure and versatile, especially in systems that need to handle both control data and larger transfers simultaneously. eSPI is now replacing older protocols in many PC and server architectures due to its scalability and reliability.
SPI Pin Assignments
Each SPI signal has a fixed role in making the transfer work. The table below states the four main pins used in SPI and their functions.

Figure 5. SPI Pin Assignments
SPI Block Diagram

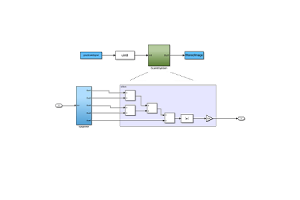
Figure 6. SPI Block Diagram
The SPI (Serial Peripheral Interface) block diagram highlights the flow of data, clock signals, and control paths, showing how SPI works in coordination with the CPU, peripheral bus, and supporting components.
At the center of this structure is the SPI module itself, which oversees serial data transfers. It links to the GPIO multiplexer, allowing flexible routing of SPI pins such as SPISIMO (Serial Data Out), SPISOMI (Serial Data In), SPICLK (Serial Clock), and SPISTE (Slave Select). These pins establish the physical connection to external peripherals, and the SPI module manages whether the microcontroller operates as a master or a slave in the exchange.
Clock control is handled through PCLKCR8, which supplies the SPI with a base clock. A low-speed prescaler divides the main system clock (SYSCLK) into LSPCLK, adjusting the frequency to match different timing requirements. The CPU coordinates with the SPI through system reset and synchronization signals, ensuring stable and predictable operation across transfers.
Data movement between the SPI module and the CPU occurs through the Peripheral Bus, which provides a streamlined channel for communication with other subsystems. Interrupt signals, such as SPIINT for received data and SPITXINT for transmitted data, are routed through the Peripheral Interrupt Expansion (PIE), alerting the CPU when action is required. For high-speed or bulk transfers, DMA channels (SPIRXDMA and SPITXDMA) allow direct data movement between memory and the SPI module, bypassing the CPU and reducing processing load.
SPI Modes
SPI timing depends on two settings: clock polarity (CPOL) and clock phase (CPHA). Together, they define whether the clock idles high or low, and on which edge data is captured. If master and slave settings do not match, data becomes corrupted.
Mode 0

Figure 7. Mode 0
In SPI Mode 0, the clock signal (SCLK) idles low, and data is sampled on the first clock edge specifically, the rising edge. As shown in Figure 7, the slave select (SS) line goes low to initiate communication, and both MISO and MOSI lines must present valid data before the first rising edge occurs. During transmission, data remains stable while the clock is high and may change when the clock is low. This mode ensures that data is captured on the low-to-high transition and shifted out on the high-to-low transition, making timing predictable and ideal for synchronous devices.
Mode 1

Figure 8. Mode 1
Mode 1 also begins with the clock idling low, but data sampling occurs on the second edge, the falling edge of SCLK. As illustrated in Figure 8, the first rising edge is used to prepare the data, while the actual sampling happens on the subsequent falling edge. In this configuration, data on MISO and MOSI lines remains stable while the clock is low and can transition when the clock is high. This mode is useful when devices require a setup phase before data capture, offering flexibility in timing alignment.
Mode 2

Figure 9. Mode 2
In Mode 2, the clock idles high, and data is sampled on the first edge, the falling edge of SCLK. As depicted in Figure 9, communication begins when SS goes low, and valid data must be present before the first falling edge. During transmission, data remains stable while the clock is low and may change when the clock is high. Sampling occurs on the high-to-low transition, while shifting happens on the low-to-high transition. This mode is effective for systems where a high clock idle state is preferred for noise immunity or signal integrity.
Mode 3

Figure 10. Mode 3
Mode 3 maintains a high clock idle state and samples data on the second edge, the rising edge of SCLK. As shown in Figure 10, the first falling edge is used to prepare the data, and the actual sampling occurs on the next rising edge. In this mode, MISO and MOSI lines remain stable while the clock is high and may change when the clock is low. This configuration is ideal for devices that require a delay before data capture and benefit from a high idle clock level, offering robust timing control in complex systems.
How SPI Operates?
An SPI transaction unfolds in a tightly controlled order. Each stage has a specific role in ensuring that data moves cleanly between the master and slave.
1. Configuring the Link
Before communication starts, the master prepares the channel. It sets parameters such as the clock speed (bitrate), the number of bits per frame (word size), and the SPI mode (which defines the clock polarity and phase). These settings must match what the slave device expects; otherwise, data will be misaligned or corrupted.
2. Selecting the Target Device
Once the master is ready, it pulls the Chip Select (CS) line of the chosen slave low. This acts as a clear signal: “You are now active, all other slaves must remain silent.” Because each slave has its own CS line, this method ensures that only one peripheral is addressed at a time.
3. Starting the Clock Pulses
The master then begins toggling the Serial Clock (SCLK). Each clock transition is like a metronome beat that dictates when data should move. At every edge of the clock, two things happen in parallel:
• The master pushes out one bit on the MOSI line.
• The slave pushes out one bit on the MISO line.
This synchronized shifting allows data to move in both directions at the same moment, creating true full-duplex exchange.
4. Shifting and Buffering Data
Inside both devices, shift registers line up the bits as they come in. Once a full byte or word has been collected, it is placed in a buffer. The master and slave each have separate transmit (TX) and receive (RX) buffers.
• In simple systems, the CPU polls these buffers, checking if they are full or empty before writing or reading new data.
• In more advanced systems, Direct Memory Access (DMA) takes over, moving data directly between memory and the SPI buffers without tying up the CPU. This is efficient for long data streams, such as transferring images to a display or reading blocks of memory.
5. Ending the Transfer
When the master finishes sending the required number of bytes or words, it raises the CS line back to high. This instantly tells the slave that the transaction is over. The slave will then idle and wait for the next selection event.
6. Scaling Across Different Workloads
This sequence is consistent whether the master is requesting a single byte from a temperature sensor or streaming megabytes of data from flash memory. The hardware mechanism does not change, only the size and pace of the transaction scale to meet the application’s needs.
Advantages and Disadvantages of SPI
|
Advantages |
Disadvantages |
|
Very
fast transfers, often tens of megabits per second |
Needs
more pins than protocols like I²C |
|
Low
latency because each bit is directly clocked |
Only
the master can generate the clock, limiting flexibility |
|
Simple
hardware with minimal logic |
No
built-in addressing, so each device requires its own CS line |
|
Scales
by adding chip-select lines for each device |
Adding
many peripherals can run out of available pins |
|
Widely
supported in almost every microcontroller |
No
standard acknowledgment mechanism (harder to detect errors) |
|
Works
well for both small data packets and continuous streams |
Limited
to short-distance communication due to signal integrity |
|
Flexible
configurations (single, multi-slave, daisy-chain, quad) |
More
complex PCB routing compared to simpler serial buses |
Applications of SPI
Memory Devices
SPI is widely used in non-volatile memory devices such as flash, EEPROM, and FRAM. These chips store program code, configuration data, and logged sensor values in embedded systems. SPI provides the high-speed, low-latency transfer needed for quick read and write operations. Because of its scalability, a single microcontroller can manage multiple memory chips through separate chip-select lines. This makes SPI ideal for applications ranging from bootloaders to large external storage modules.
Sensors
Many digital sensors, including accelerometers, gyroscopes, pressure sensors, and temperature sensors, rely on SPI for communication. These devices often need to deliver precise data, such as when measuring motion or monitoring environmental conditions. The low-latency nature of SPI ensures data reaches the microcontroller quickly enough for control loops or safety systems. Since multiple sensors can be attached using dedicated chip-selects, SPI makes it easy to integrate several measurement points into one design. This capability is valuable in robotics, IoT, and industrial monitoring systems.
Display Controllers
Modern LCD and OLED display driver chips often use SPI to receive commands and pixel data. Because displays demand rapid transfers of large amounts of data, SPI’s ability to achieve high bandwidth with minimal overhead is a major advantage. Smaller displays in wearables or handheld devices benefit from the reduced pin count compared to parallel interfaces. At the same time, SPI keeps wiring simple while still allowing fast updates for graphics or text. This combination makes SPI one of the most common interfaces for display modules.
Wireless Modules
Wireless communication chips, such as those used for Bluetooth, Wi-Fi, and RF transceivers, often connect to microcontrollers through SPI. These modules handle complex radio protocols but need a reliable, high-speed interface to pass data back and forth. SPI ensures the microcontroller can quickly send commands and receive packets with minimal delay. Because many wireless systems operate in time-sensitive environments, SPI’s deterministic timing is an advantage.
Motor Control Systems
In motor control, SPI is used to connect microcontrollers with gate drivers, encoders, and feedback modules. This is important in brushless DC (BLDC) or stepper motor systems, where precise timing and synchronization are needed. SPI ensures that control commands and feedback signals are exchanged quickly and predictably. The interface also allows motor drivers to report fault conditions or detailed diagnostic data. This makes SPI a preferred option for automation equipment, robotics, and electric vehicles where efficiency and safety matter.
Audio Processing
Digital audio systems often use SPI to move data between microcontrollers, DACs, ADCs, and codecs. In playback or recording applications, timing must be extremely precise to avoid distortion or loss of quality. SPI provides the needed low-latency, high-speed transfers to keep audio streams continuous. It also allows for configuration commands, such as setting volume levels or sampling rates, to be sent quickly to audio chips. This makes SPI valuable in applications like voice assistants, music players, and embedded audio devices.
Industrial Automation
Programmable Logic Controllers (PLCs) and industrial systems rely on SPI to expand their I/O or connect to ADCs and DACs. Industrial environments are often noisy and demanding, so the robustness and simplicity of SPI are attractive. Its straightforward wiring reduces failure points while still delivering fast and predictable communication. Multiple peripherals can be tied to the same controller, allowing modular system expansion. For this reason, SPI remains a staple in factory equipment, instrumentation, and rugged control systems.
Automotive Electronics
Modern vehicles integrate SPI into systems such as Engine Control Units (ECUs), dashboard displays, and sensor hubs. These subsystems demand high reliability, low latency, and consistent performance, all of which SPI provides. The protocol ensures fast data exchange between sensors, processors, and display units, supporting safety and comfort features. Automotive designs also benefit from SPI’s scalability, which allows many independent subsystems to coexist on the same controller. From advanced driver assistance systems to infotainment, SPI plays a role in vehicle electronics.
Conclusion
SPI is a reliable way to move data quickly in both directions using just four main wires. By setting the clock and mode correctly, devices can talk without errors. Different versions like QSPI or Daisy-Chain let you choose between speed, fewer pins, or more flexibility. Inside the system, interrupts and DMA can make transfers faster and easier for the CPU. While SPI needs more pins and always depends on the master for timing, it is still very popular because it is simple, fast, and works with many devices. That is why it is widely used in electronics for memory, sensors, displays, wireless systems, motors, audio, industry, and cars.
About us
ALLELCO LIMITED
Read more
Quick inquiry
Please send an inquiry, we will respond immediately.
Frequently Asked Questions [FAQ]
1. Is SPI faster than I²C?
Yes, SPI is typically faster than I²C because it allows full-duplex communication and higher clock speeds, often reaching tens of megabits per second. I²C, while simpler for multiple devices, is generally slower and half-duplex.
2. Can SPI work with multiple slave devices?
Yes. Each slave requires its own Chip Select (CS) line, controlled by the master. For systems with limited pins, daisy-chain or shared SPI bus configurations can reduce wiring needs.
3. What clock speed can SPI support?
SPI clock speeds vary by device but commonly range from 1 MHz to over 50 MHz. High-performance systems, such as Quad SPI (QSPI), can push throughput even higher for demanding applications like flash memory.
4. Does SPI need pull-up resistors like I²C?
No. SPI does not require pull-up resistors because it uses push-pull drivers for its lines. This makes SPI more robust at high speeds compared to open-drain I²C.
5. Can SPI and I²C be used together in the same system?
Yes. Many microcontrollers support both SPI and I²C, allowing to use SPI for speed-critical peripherals (like displays or memory) and I²C for simpler, lower-speed devices (like sensors).

Three-Phase Motors: Types, Advantages, Construction and Applications
on August 22th

What Is RF and Why Do We Use It?
on June 20th
Popular Posts
-

Complex Instruction Set Computers: How They Changed Computing?
on June 4th 148298
-

USB-C Pinout and Features
on June 4th 129904
-
Using Xilinx Unified Simulation Primitives: A Comprehensive Guide to FPGA Design and Simulation
on June 4th 111778
-

Power Supply Voltages in Electronics: Meaning of VCC, VDD, VEE, VSS, and GND
on June 4th 93324
-

RJ45 Connector Guide: Pinout, Wiring, Cable Types, and Uses
on January 1th 92002
-

The Ultimate Guide to Wire Color Codes in Modern Electrical Systems
The way our electrical systems use colors isn’t just for looks. Each wire color now indicates a specific function, making it easier to identify and handle electrical components correctly during ins...on January 1th 76116
-

Quality (Q) Factor: Equations and Applications
The quality factor, or 'Q', is important when checking how well inductors and resonators work in electronic systems that use radio frequencies (RF). 'Q' measures how well a circuit minimizes energy...on January 1th 74018
-

Purge Valve Guide: Function, Symptoms, Testing, and Replacement for Optimal Engine Performance
The purge valve is a key part of a car’s system that helps keep the air clean by managing fuel vapors before they can escape into the atmosphere. This not only helps the environment by reducing pol...on January 1th 68021
-
Understanding Capacitors and Their Symbols in Circuit Diagrams
Capacitors are small parts used in almost all electronic devices. They store and release electrical energy and are found in things like power supplies, radios, and circuits that help reduce noise. ...on June 4th 57890
-

A23 Battery Specifications and Compatibility
The A23 battery is a small, cylinder-shaped battery with high voltage. Also called 23A, 23AE, or MN21, it runs at 12 volts and much higher than AA or AAA batteries. Its special design make...on January 1th 57471
HOT Part Number
-

TS2937CP50
Taiwan Semiconductor Corporation
0.5A 5V ULTRA LOW DROPOUT VOLTAG
RC0603FR-072R4L
YAGEO
RES 2.4 OHM 1% 1/10W 0603
NOJB686M006RWJ
KYOCERA AVX
CAP NIOB OXID 68UF 20% 6.3V 1210
MC74HC03ANG
onsemi
IC GATE NAND OD 4CH 2-INP 14DIP
6-1761615-5
TE Connectivity AMP Connectors
CONN DIFF ARRAY RCPT 200POS SMD
2EZ15D5
Microsemi Corporation
DIODE ZENER 15V 2W DO204AL
MMSZ5247BT1G
onsemi
DIODE ZENER 17V 500MW SOD123
AN1431M-E1
Panasonic Electronic Components
IC VREF SHUNT ADJ 2% 3HSIP
1N4595
Powerex Inc.
DIODE GP 1.2KV 150A DO205AA
GRM1886S1H750JZ01D
Murata Electronics
CAP CER 75PF 50V S2H 0603
A5358CA
Allegro MicroSystems
IC SMOKE DETECTOR PHOTO 16DIP
GRT31CR61E106ME01L
Murata Electronics
CAP CER 10UF 25V X5R 1206
35YXA470MEFC10X16
Rubycon
CAP ALUM 470UF 20% 35V RADIAL
NC7ST04P5
Fairchild Semiconductor
INVERTER, HST/T SERIES, 1 FUNC,
NJM2246M
Nisshinbo Micro Devices Inc.
IC VIDEO SW 3IN/1OUT 8DMP
M37477E8SP
Renesas Electronics America Inc
8-BIT, OTPROM, 8MHZ
ATMEGA164A-PU
Microchip Technology
IC MCU 8BIT 16KB FLASH 40DIP
3362X-1-501LF
Bourns Inc.
TRIMMER 500 OHM 0.5W PC PIN SIDE -

PE-52626
Pulse Electronics
FIXED IND 220UH 1.5A 420 MOHM TH
NCP15XW152J03RC
Murata Electronics
THERM NTC 1.5KOHM 3950K 0402
FAN501MPX
Fairchild Semiconductor
IC OFFLINE SWITCH FLYBACK 10MLP
PIC32MX230F064D-I/PT
Microchip Technology
IC MCU 32BIT 64KB FLASH 44TQFP
DS1775R+T&R
Analog Devices Inc./Maxim Integrated
SENSOR DIGITAL -55C-125C SOT23-5
TZM5232B-GS18
Vishay General Semiconductor - Diodes Division
DIODE ZENER 5.6V 500MW SOD80
CL10A475KL8NRNC
Samsung Electro-Mechanics
CAP CER 4.7UF 35V X5R 0603
BFC237321685
Vishay Beyschlag/Draloric/BC Components
CAP FILM 6.8UF 10% 100VDC RADIAL
SE5532AD8R2G
onsemi
IC OPAMP GP 2 CIRCUIT 8SOIC
54LS21DMQB
Texas Instruments
AND GATE, LS SERIES
CS51414ED8
onsemi
IC REG BUCK ADJ 1.5A 8SOIC
5SGXMA5N2F40C2N
Intel
IC FPGA 600 I/O 1517FBGA
DAC8841FS
Analog Devices Inc.
IC DAC 8BIT V-OUT 24SOIC
PVD3354NS
Infineon Technologies
SSR RELAY SPST-NO 240MA 0-300V
EMK212BJ475KG-T
Taiyo Yuden
CAP CER 4.7UF 16V X5R 0805
MC14099BFL1
onsemi
D LATCH, LOW LEVEL TRIGGERED,
IS82C55AZ96
Renesas Electronics America Inc
IC XPNDR PARALLEL 44PLCC
ADM809-5LARTZ-RL7
Analog Devices Inc.
IC SUPERVISOR MPU 4.63V SOT23 -
GRM2166T1H301JD15D
Murata Electronics
CAP CER 300PF 50V T2H 0805
FAN3850AUC19X
onsemi
IC AMP CLASS AB MONO 6WLCSP
XC2V3000-5BF957C
AMD
IC FPGA 684 I/O 957FCBGA
STMAV335TTR
STMicroelectronics
IC VIDEO SWITCH SP3T 16TSSOP
A451PM
Powerex Inc.
DIODE GP 1.6KV 2500A DO200AC
FQD12P10TM
Fairchild Semiconductor
MOSFET P-CH 100V 9.4A TO252
CL10C150JB8NFNC
Samsung Electro-Mechanics
CAP CER 15PF 50V C0G/NP0 0603
ADT7320UCPZ-R2
Analog Devices Inc.
SENSOR DGTL -40C-150C 16LFCSP
SMAJ30CA
SMC Diode Solutions
TVS DIODE 30VWM 48.4VC SMA
NCP552SQ33T1
onsemi
IC REG LINEAR 3.3V 80MA SC82AB
MAX6326UR29+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL SOT23-3
SN74LVC573APWR
Texas Instruments
IC OCTAL TRANSPAR LATCH 20-TSSOP
CPF0603B360RE1
TE Connectivity Passive Product
RES SMD 360 OHM 0.1% 1/16W 0603
AD623AR-REEL
Analog Devices Inc.
IC INST AMP 1 CIRCUIT 8SOIC
LM385BD-2-5
Texas Instruments
IC VREF SHUNT 1.5% 8SOIC
SPX29150T-L-5-0/TR
Diodes Incorporated
IC REG LINEAR 5V 1.5A TO263AB
XC7VX980T-L2FFG1930E
AMD
IC FPGA 900 I/O 1930FCBGA
CC0603ZRY5V9BB153
YAGEO
CAP CER 0.015UF 50V Y5V 0603